

We are working with PNI RM3100 magneto-inductive magnetometers to develop ground and space-based magnetometer sensors. We are packaging and testing these chip-based sensors to perform in extreme environments on Earth and in Space. We are developing new magnetometer system architectures to enable noise identification in order to simplify ground-based and space-based magnetometry.
New System Architecture

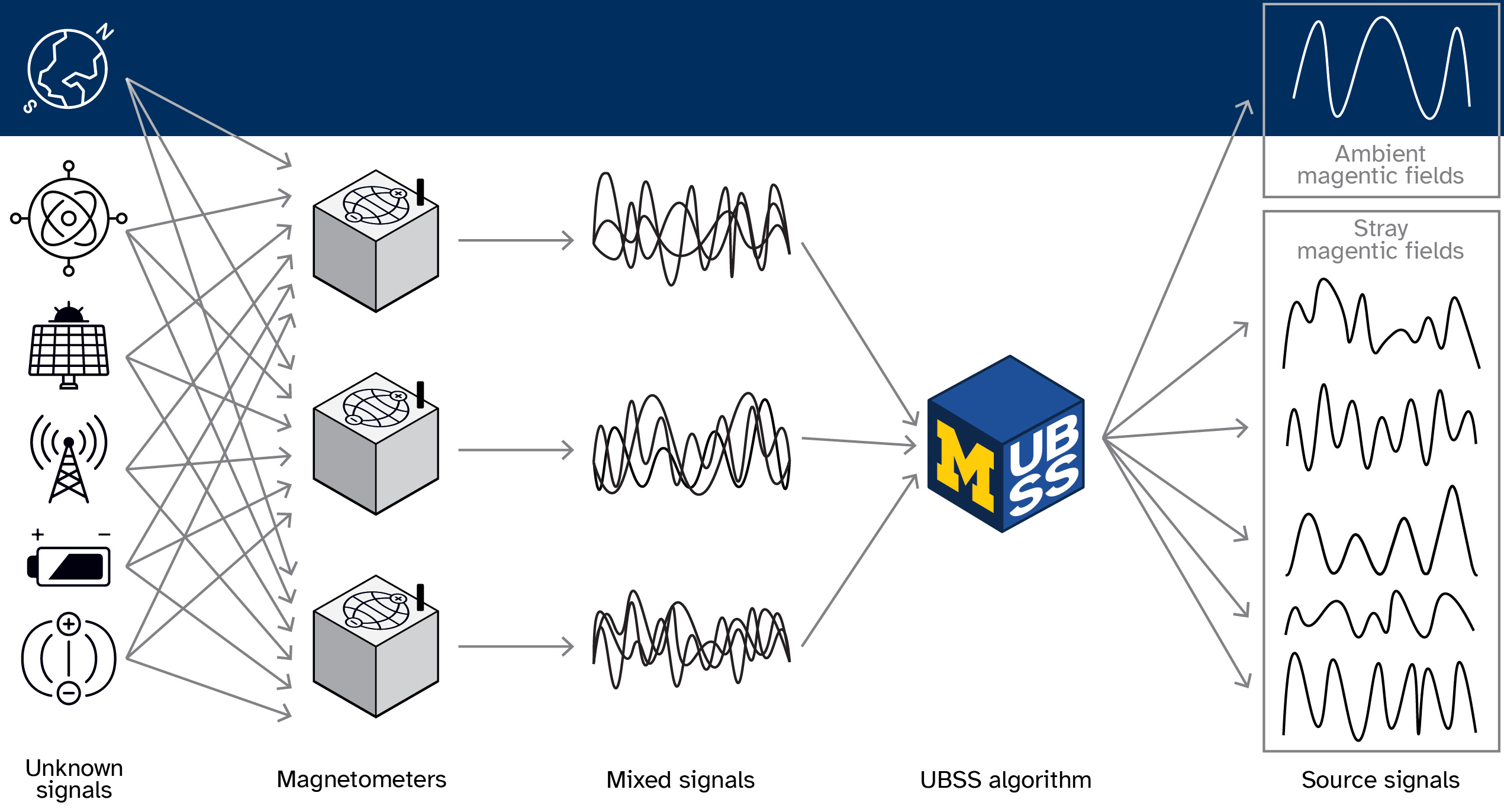
By utilizing extremely low power (5 mW), low mass (5 g) and small size (2.5 x 2.5 x 2 cm) sensors, we can place multiple sensors on the ground or on the spacecraft to be able to sense the natural geomagnetic field and identify any noise sources from the surroundings or satellite. Using a variety of noise identification algorithms, we can remove the noise decreasing the susceptibility to environmental noise (such as cars) around ground sensors and from spacecraft sub-systems. This enables lower fidelity magnetic cleanliness and sub-system magnetic characterization efforts.
The NEMISIS concept uses three magnetometers – a high-quality fluxgate magnetometer on the end of a short boom and two body mounted PNI RM3100 magnetometers. The data from the three sensors can then be used to “clean” the data from spacecraft noise.
Smart algorithm’s like unsupervised blind source separation can separate out the space noise from the mixed signal that contains the geophysical signal of interest with a short boom or no boom.
Projects

NASA Artemis Lunar Gateway HERMES/NEMISIS
NASA-SwRI-UM ICOVEX CubeSat MIM
NASA ICEE2 Europa Lander Magnetometer
NSF iMAGS Space Weather Sensor
NASA LWS Geomagnetic Induced Current FST
NASA HTIDEs and STMD SSTP Efforts
ONR SENSORS